Cette étape consiste à assembler une autre partie de la structure du OpenROV: le e-chassis. Cet élément va accueillir les éléments électroniques embarqués du ROV, et venir se placer dans un cylindre étanche, qui sera placé à l’avant du ROV. L’e-chassis peut tourner dans ce cylindre, ce qui permet d’orienter la caméra embarquée et les rampes de LEDs.
Les éléments électroniques embarqués comprennent:
- les variateurs de vitesse
- l’ordinateur de bord (Beaglebone)
- l’interface entre le Beaglebone et les autres éléments
- un servo
- une webcam HD
- deux rampes de LED
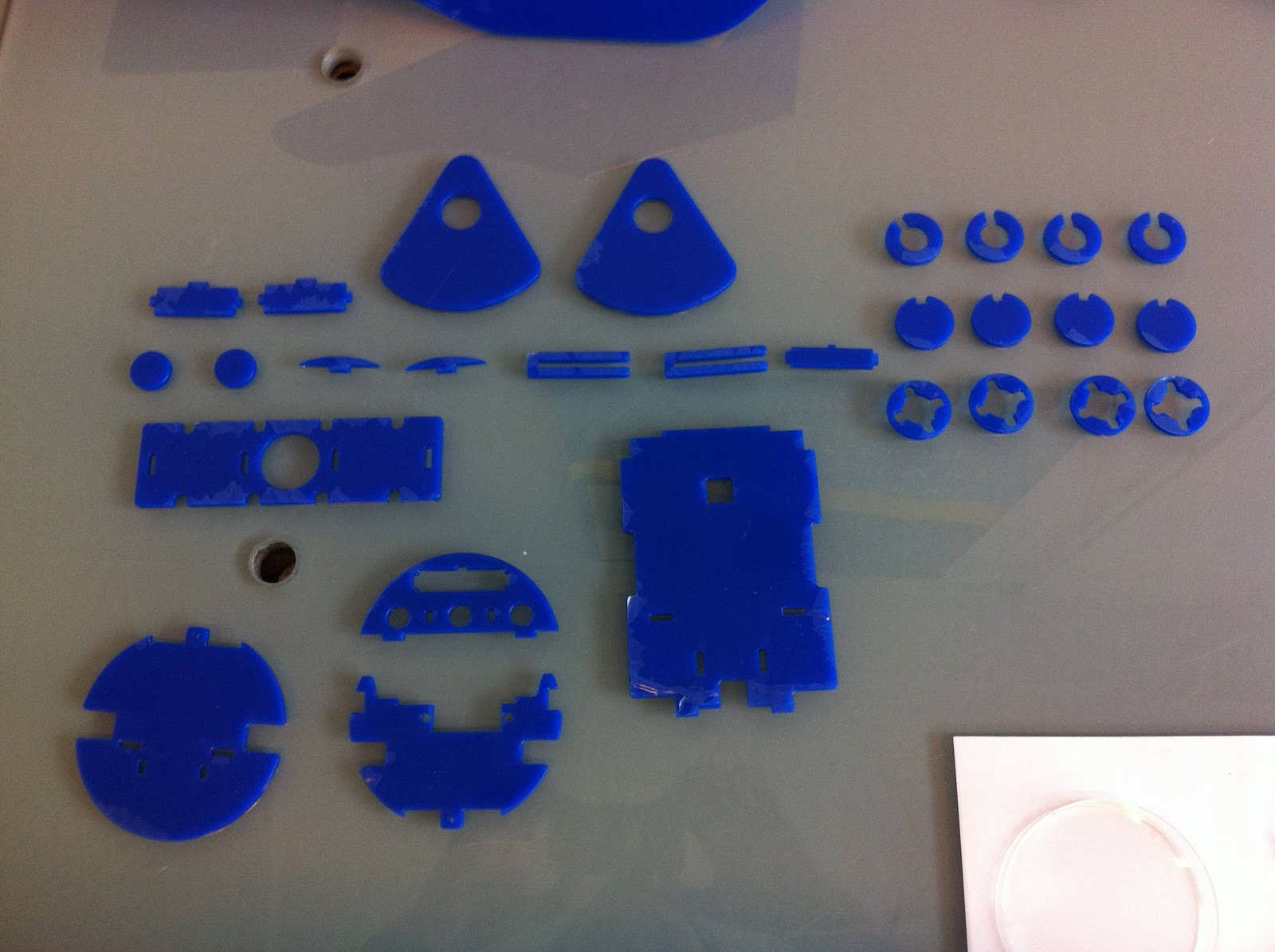
Voici quelques photos de cet assemblage:
 |
| Pièces pour l’e-chassis, avant montage. Photo: Bruno Danis |
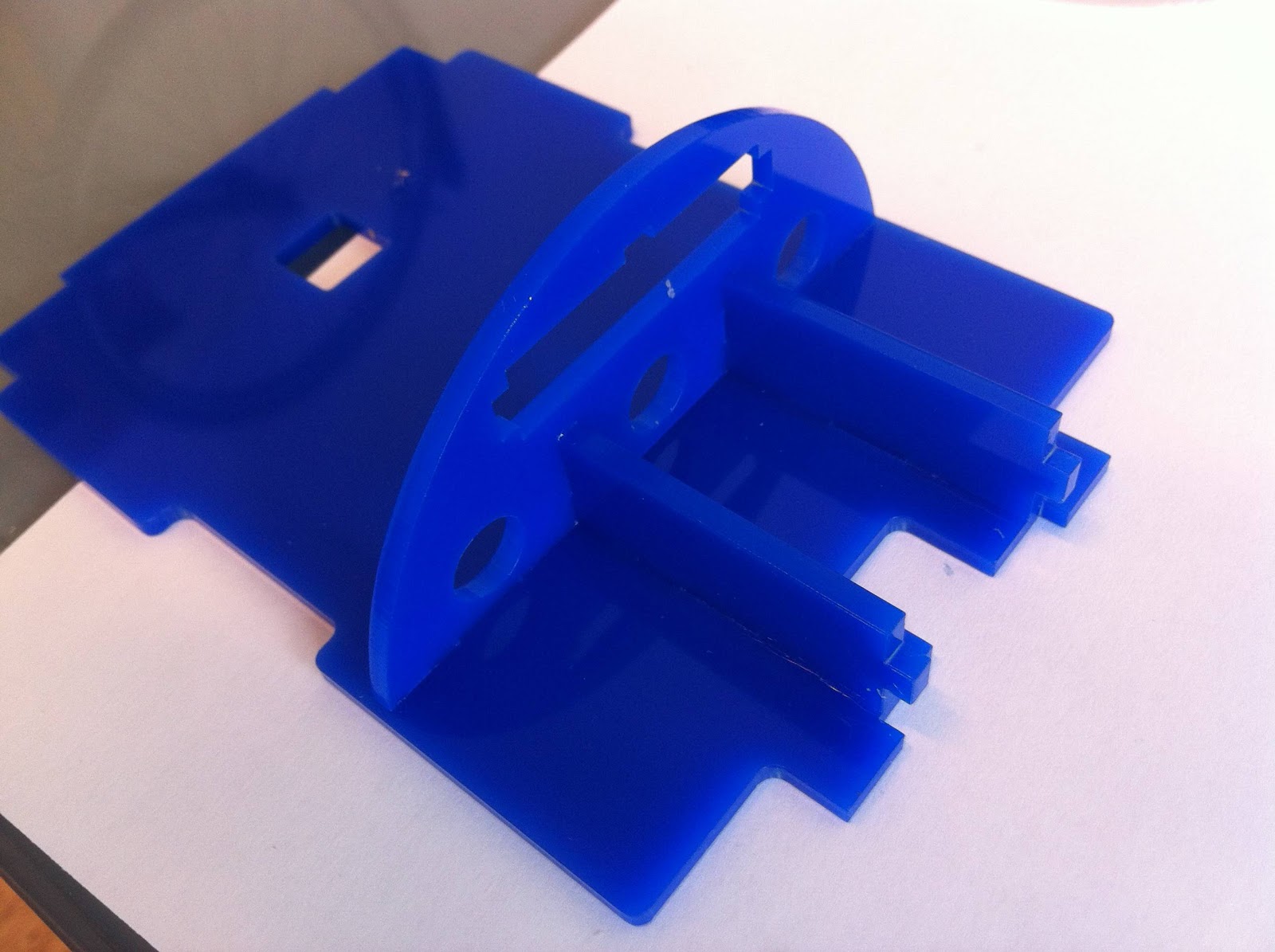
 |
| Une partie de l’e-chassis est monté. Photo: Bruno Danis |
 |
| Fixation de la webcam HD, à l’aide de colsons. Photo: Bruno Danis |
 |
| Fixation des rampes de LEDs à l’aide de colle epoxy. Photo: Bruno Danis |
 |
| L’e-chassis terminé, on voit l’encoche pour l’objectif de la caméra. Photo: Bruno Danis |