La première étape dans le projet OpenROV est bien sûr de commander toutes les fournitures nécessaires. Cette partie a demandé plus de travail que prévu, les fournisseurs habituels étant basés aux USA. La structure du submersible étant conçue de manière extrêmement précise, il nous a fallu beaucoup d’efforts pour rassembler toutes les pièces du puzzle. Au jour d’écrire ces lignes, certaines pièces vitales sont encore en route vers le Laboratoire. Qu’à cela ne tienne, nous avons reçus les éléments principaux du châssis, découpés au jet d’eau.
 |
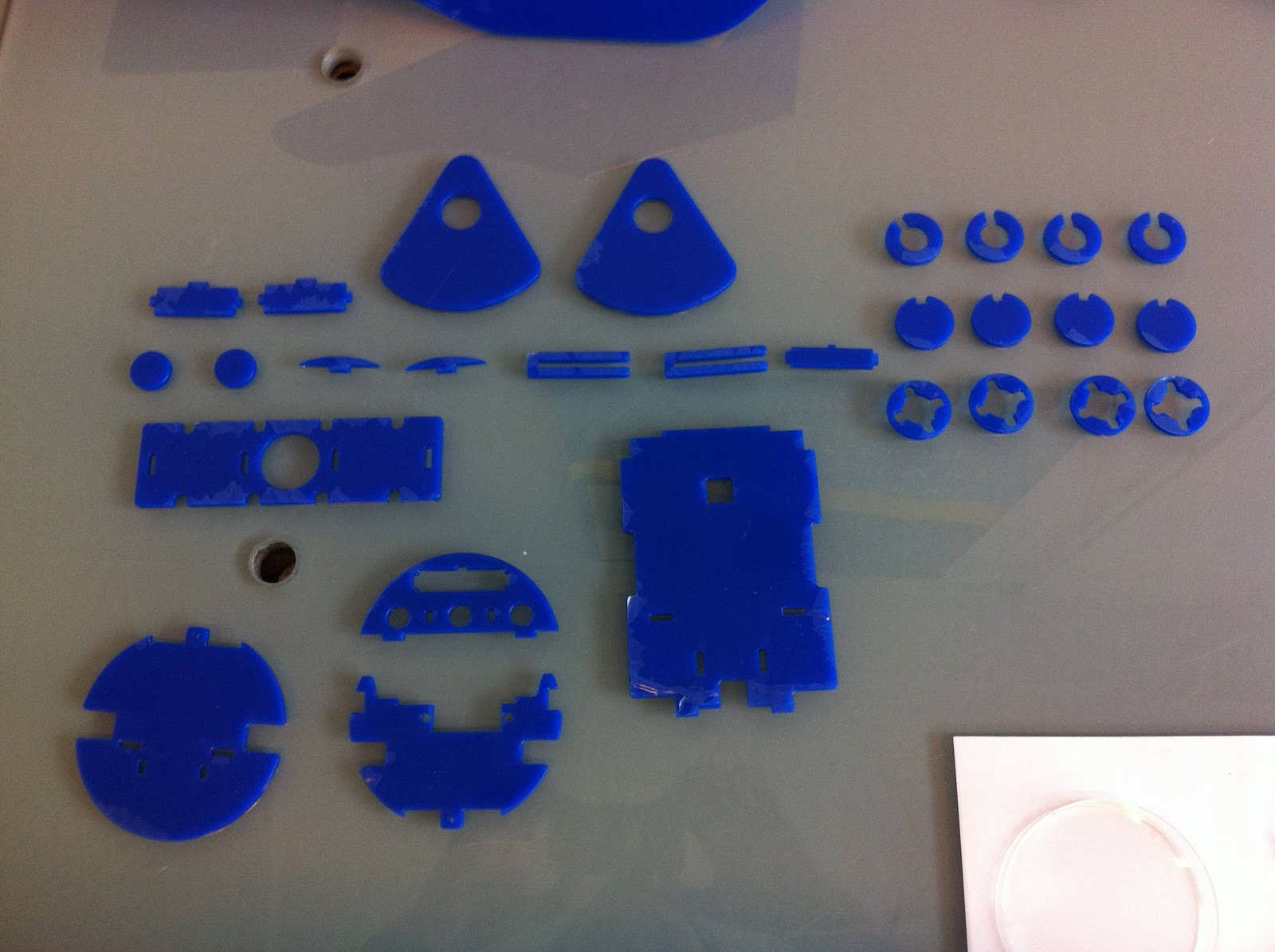
| Les éléments structuraux du ROV. Photo: Bruno Danis |
Dès que possible, nous partagerons la liste des éléments indispensables au montage d’un OpenROV, adapté au marché Belge, avec des estimations de délais de livraison, et des remarques utiles par rapports aux éléments qui demandent une attention particulière.
OpenROV by OpenROV is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License.