This gallery contains the pictures we extracted from the video transects that we operated in Portman (Spain, 2013). Each picture is a support for a Bay’ species cartography work.
Please Do not hesitate to contact me for any question/doubt about our identifications or to notice any specie you could identify on the pictures
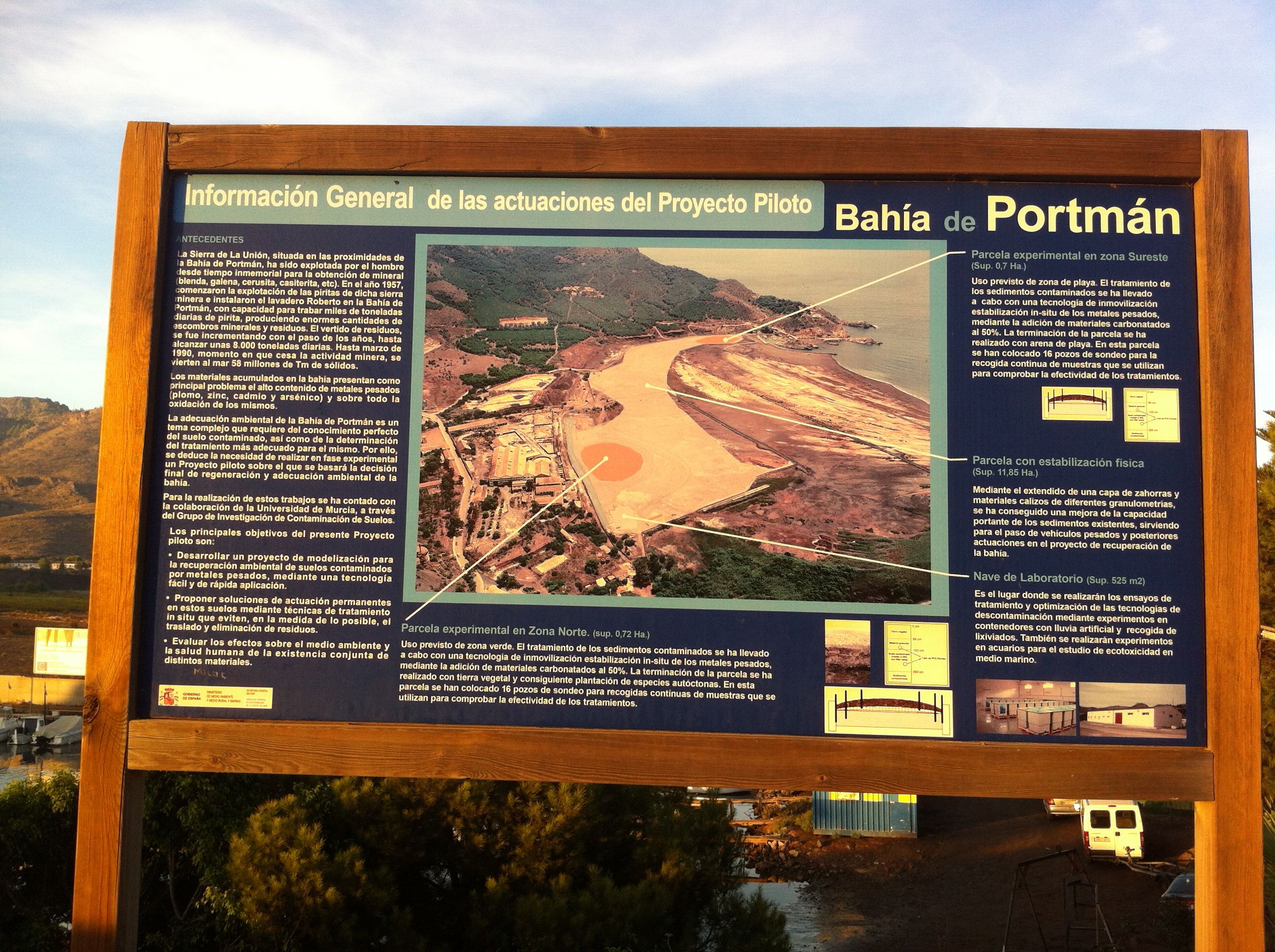
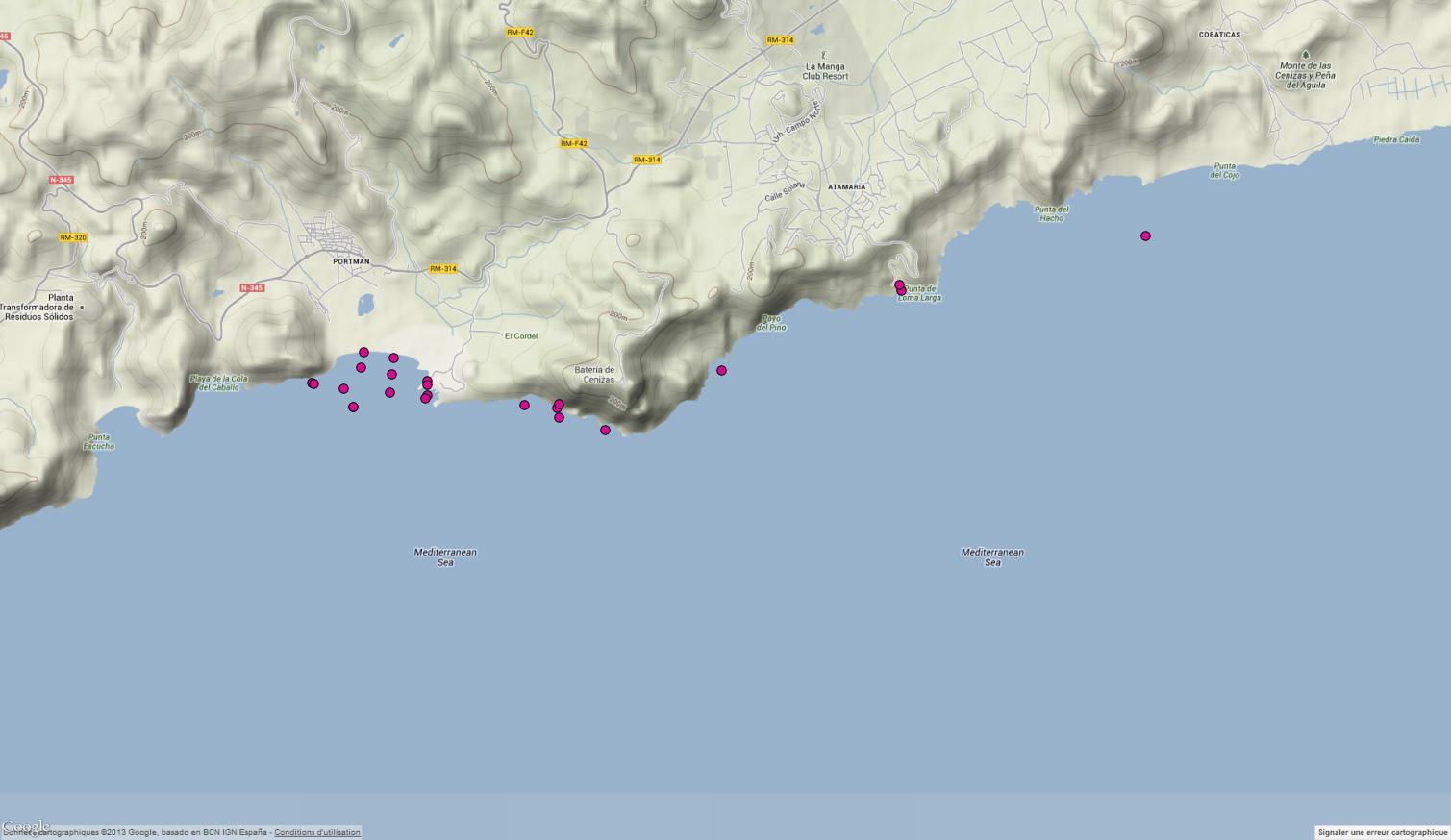
From 17/10/2013 to the 24/10/2013 we captured some video transects of shallow benthic habitats encountered within or close to the bay of Portmàn (Murcia, Spain), which is subject to a strong pollution by metallic compounds due to an old mining activity. The following pictures, extracted from these video transects were used to fill species’ distribution files that sould be available for the whole scientific community through an online portail (Link). Thus this post aims to provide a visual support relative to this occurrence file, but is also open for suggestions about identifications that are not already tagged on the pictures and that would increase our data about species distribution. You might see some identifications relative to the class, family or genus. It is relative to individuals that we could not identify to the specie level ( we limit our identifications to the lowest taxonomic rank that we are undoubted about).

Anemonia viridis

Anemonia viridis

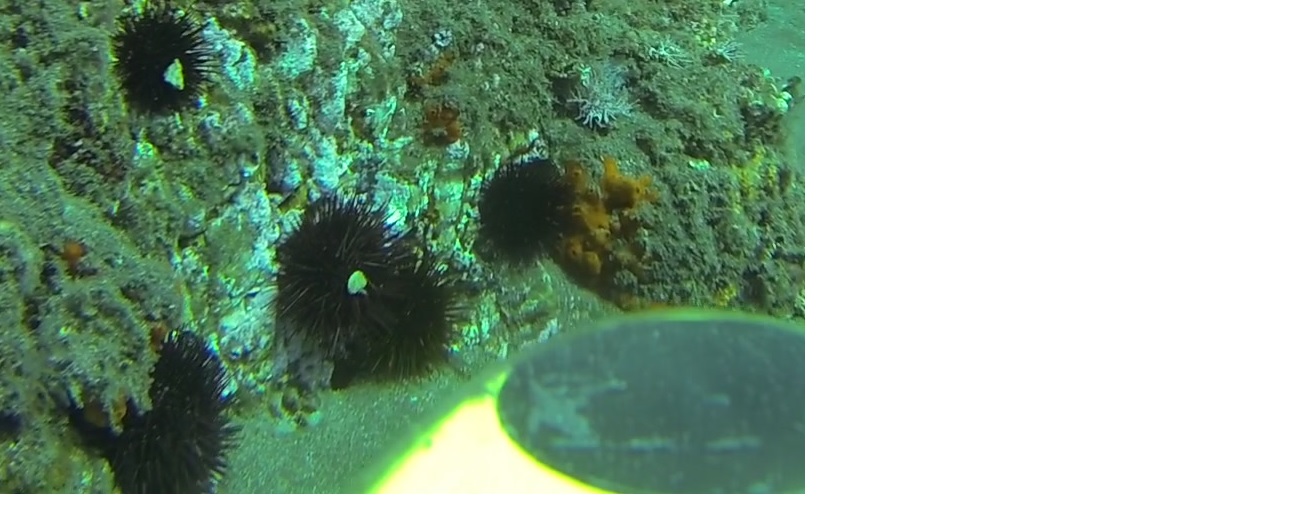
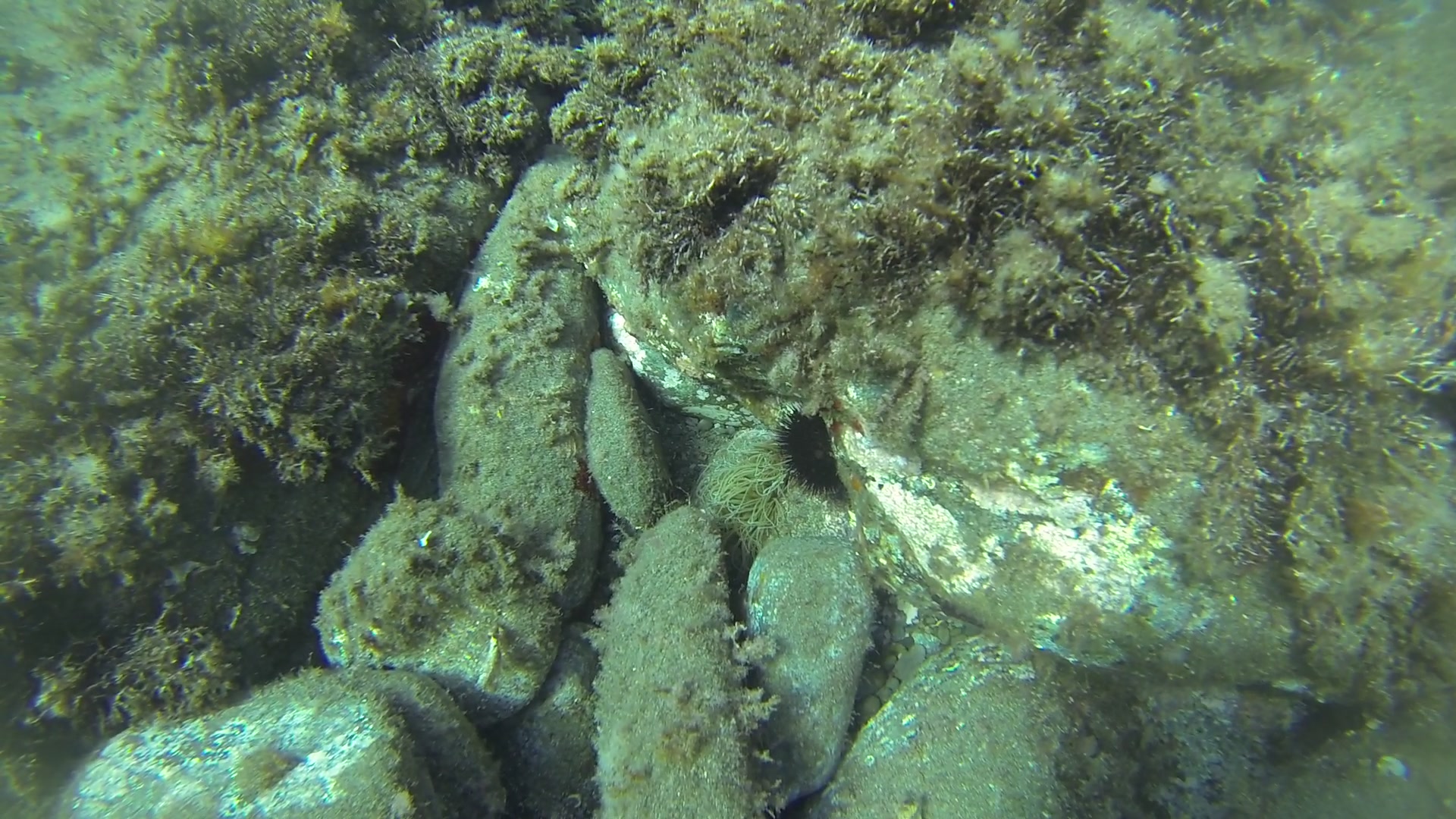
Anemonia viridis – Echinoidea

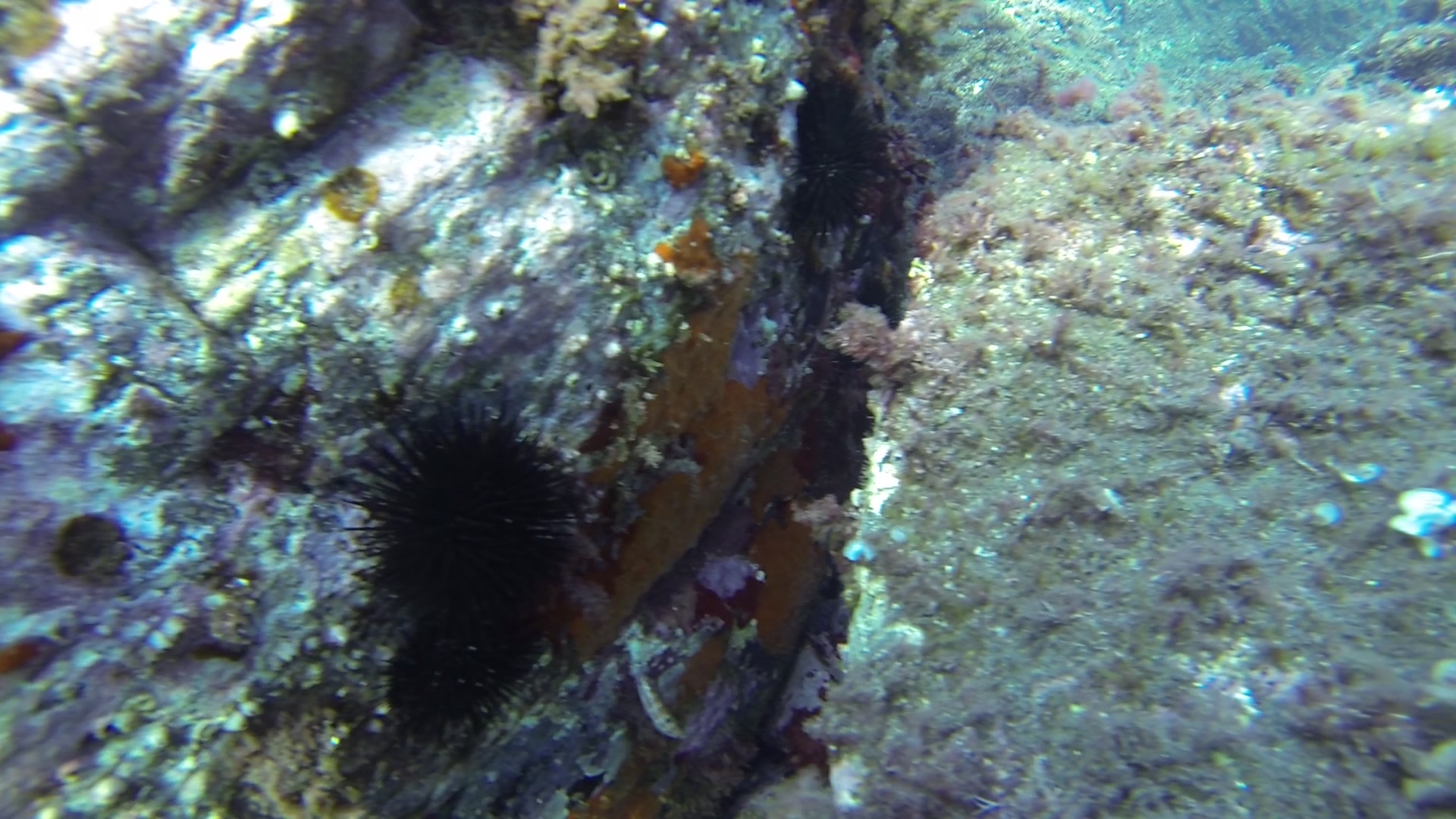
Paracentrotus lividus – Echinoidea

Paracentrotus lividus

Echinoidea – Paracentrotus lividus – Padina povonica

Padina pavonica
Paracentrotus lividus – Echinoidea

Pinna nobilis

Posidonia oceanica

Echinaster sepositus

Ophidiaster ophidianus
Corallina sp – Echinoidea

Pinna nobilis – dictyota sp.
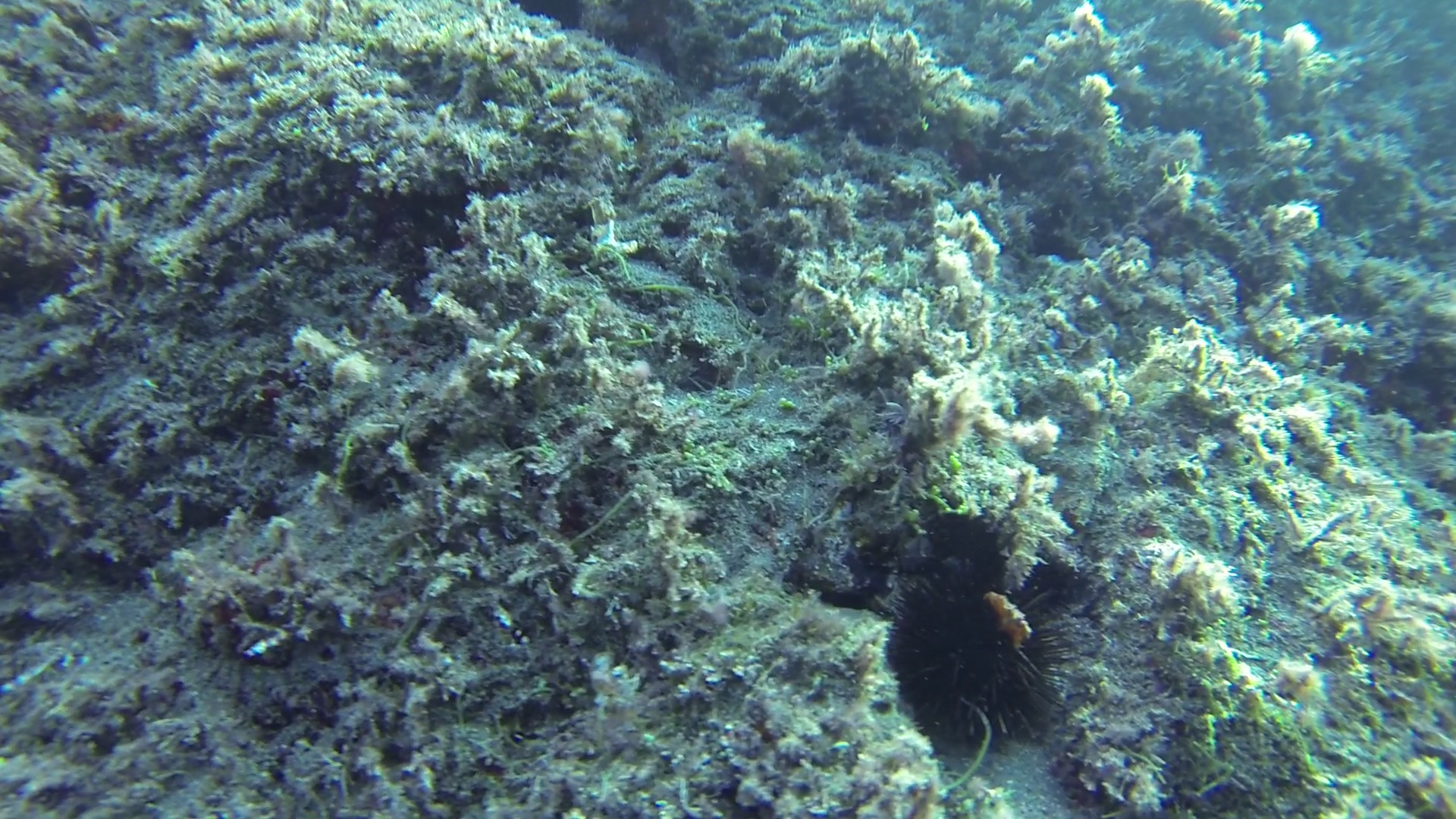
Echinoidea

Echinoidea
Echinoidea

Echinoidea

Paracentrotus lividus

Maxillopoda – Paracentrotus lividus

Asteroidea

Echinoidea
Anemonia viridis – Echinoidea

Echinoidea
Echinoidea
Echinoidea
Paracentrotus lividus

Codium bursa

Caulerpa racemosa – Echinaster sepositus
Spongia officilanis

Halimeda tuna – Echinaster sepositus
Arbacia lixula

Echinaster sepositus – Halimeda tuna – Padina pavonica

Paracentrotus lividus

Echinoidea

Paracentrotus lividus

Holothuria sanctori
Echinoidea
Corallinna sp. – Paracentrotus lividus

Eunicella sp.

Echinaster sepositus – Halimeda tuna – Padina pavonica

Paracentrotus lividus – Corallina sp.

Anemonia viridis

Echinoidea